كشف فريق من الباحثين عن كلب روبوتي برمائي متطور قادر على التنقل على اليابسة والماء بكفاءة عالية، واستُلهمت الدراسة، المنشورة في مجلة Bioinspiration & Biomimetics، من قدرة الثدييات على الحركة في الماء وعلى اليابسة.
ووفقا لما ذكره موقع "tecxplore"، تستوحي الروبوتات البرمائية الحالية تصميمها بشكل كبير من الزواحف أو الحشرات، وغالبًا ما تواجه قيودًا في خفة الحركة والديناميكية والقدرة على التحمل.
ويتيح تصميم الروبوت البرمائي على غرار أسلوب سباحة الكلاب سهولة الانتقال بين اليابسة والماء، والتغلب على العديد من التحديات التي تواجهها التصاميم المستوحاة من الحشرات.
يمهد الروبوت البرمائي الطريق لتطبيقات مستقبلية في البحوث البيئية، والمركبات العسكرية، ومهام الإنقاذ.
ولتحسين قدرته على الحركة في الماء، يتميز الكلب الروبوتي البرمائي بآلية تجديف فريدة، مستوحاة من حركة سباحة الكلاب.
ويضمن التصميم الهندسي الدقيق لهيكله، بما في ذلك التوازن الدقيق بين الوزن والطفو، أداءً مائيًا مستقرًا وفعالًا.
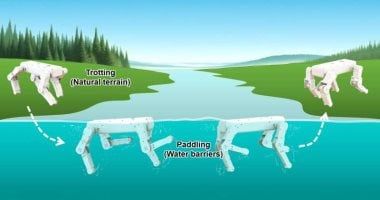
طور الفريق واختبر ثلاث طرق مميزة للتجديف:
• طريقتان مستوحاتان من مجداف الكلاب، مُحسنتان للسرعة والدفع.
• أسلوب تجديف يشبه الهرولة، مُصمم لتعزيز الثبات في الماء.
• من خلال تجارب مكثفة، أثبتت طريقة التجديف بالكلاب تفوقها في السرعة، حيث بلغت أقصى سرعة في الماء 0.576 كيلومتر في الساعة، بينما أعطى أسلوب الهرولة الأولوية للثبات.
وعلى اليابسة، تصل سرعة الكلب الآلي البرمائي إلى 1.26 كيلومتر في الساعة، مما يوفر تنقلًا متعدد الاستخدامات في البيئات البرمائية.
يقول يونكوان لي، الباحث المراسل للدراسة: "يمثل هذا الابتكار خطوة كبيرة إلى الأمام في تصميم الروبوتات المستوحاة من الطبيعة".
وترجع قدرة كلبنا الآلي على التحرك بكفاءة في الماء وعلى اليابسة إلى تخطيطه للمسار المستوحى من علم الأحياء، والذي يحاكي مشية التجديف الطبيعية للكلاب الحقيقية.
ويعالج هيكل الأرجل ثنائي المفصل وثلاث مشيات تجديف مختلفة القيود السابقة، مثل سرعات السباحة البطيئة وتخطيط المشية غير الواقعي، مما يجعل الكلب الآلي أكثر فعالية في الماء.






0 تعليق